
The hard-sphere packing (HSP) is often used as model system for the investigation of the rheology and dynamic behavior of amorphous states of matter including liquids, glasses and granular materials. This model exhibits emergent properties arising from collective particle interactions, such as order-disorder transition, dilatancy, shear strength, jamming transition, force chains and arching in static piles. It is clear that in application to most granular materials such as powders and soils with various particle shapes and size distributions, the HSP is not a realistic model. We should therefore distinguish the generic behavior, shared between spherical and aspherical particle shapes, from specific behavior that depends on specific particle shapes. In this respect, the behavior of packings of spherical particles can be used as reference behavior from which the specific behaviors can be quantified.
Such a systematic investigation was proposed for the first time by the work group CEGEO several years ago (see paper here). The issue addressed in this work is the following. The particle shape characteristics such as elongation, angularity, slenderness and non-convexity are described by distinct groups of parameters, and the effect of each parameter is not easy to isolate experimentally. The idea was that the lowest-order shape parameter should not refer to any particular shape characteristic, but simply represent a deviation or distortion from a perfectly spherical or circular shape. The surface or border of a particle is fully enclosed between two concentric circles (with their center located at the center of mass): a circumscribing circle of radius R and an inscribed circle of radius R − ΔR. A η-set is defined as the set of all shapes having their surface enclosed between a pair of concentric spheres (circles in 2D), touching both spheres (or circles) and having the same ratio η=ΔR/R. Four different particle shapes belonging to the same η- set are shown below.
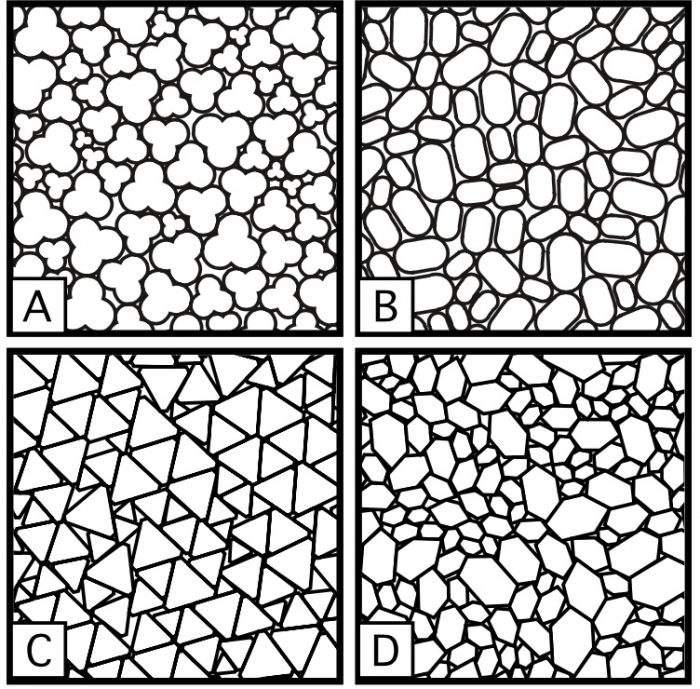
Several particle shapes belonging to the same η-set.
A non-zero value of η corresponds to non-convexity for A-shape, elongation for B-shape, angularity for C-shape, and a combination of angularity and elongation for D-shape. The parameter η is obviously a rough low-order shape parameter, but, encompassing most specific shape parameters, it provides a general framework in which shape dependence may be analyzed among particles of different shapes. Within an η-set, each specific shape may further be characterized by higher-order parameters. The group used Discrete Element simulations to investigate how the packing fraction and shear strength of four different shapes were controlled by η and in which respects the behavior depends on higher-order shape parameters. It was found that this parameter controls to a large extent both the shear strength and packing fraction of granular media composed of non-circular particles in 2D. The shear strength is roughly linear in η whereas the packing fraction is unmonotonic in all cases. It was further shown that the unmonotonic dependence is governed by a first-order term in η for the shrinkage of the initial steric pores and a second-order term in η for the creation of large pores by shape-induced steric pores.
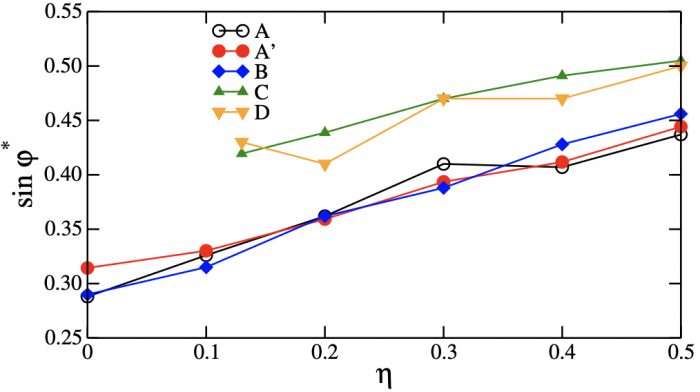
Bulk friction angle versus shape parameter for four different particle shapes. A and A’ are simulated by two different methods, but yielded similar results. η=0 corresponds to circular shape.
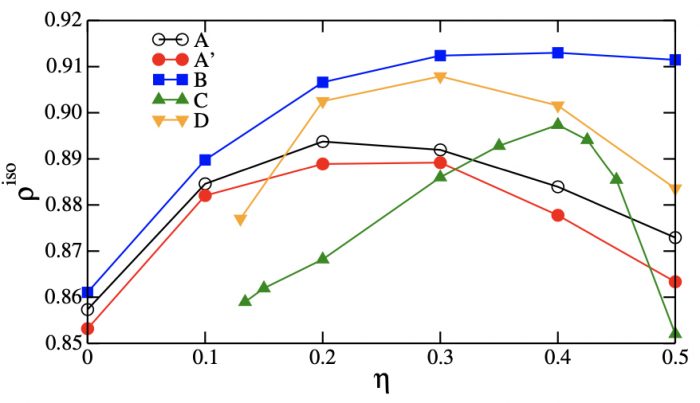
Unmonotonic variation of the packing fraction with shape parameter for all particle shapes considered.
The effect of higher-order shape parameters can now be analyzed also in this framework in terms of differences in packing fraction and shear strength among various shapes belonging to the same η-set. In particular, within the same η-set, we distinguish between angular (nonsmooth like C and D shapes) and rounded (smooth like A and B) shapes, the latter showing larger shear strength. The larger shear strength of a packing of faceted particles, as compared to a packing of spheres, is a consequence of the large force anisotropy and stronger force chains induced by face-face contacts. In contrast, the fabric anisotropy is larger in the case of spherical particles (see here).
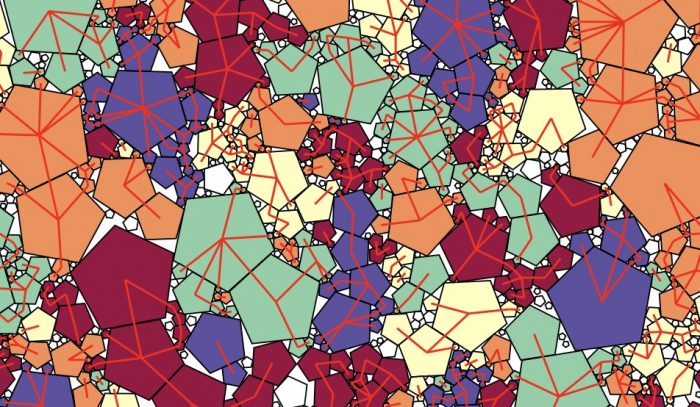
A polydisperse packing of pentagons. Simulations by D.H. Nguyen.
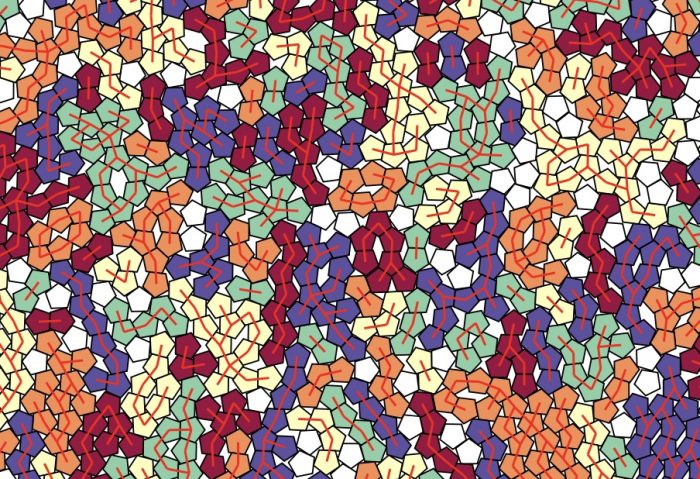
A monodisperse packing of pentagons. Simulations by D.H. Nguyen.

A packing of irregular polyhedra. Simulation by E. Azéma.
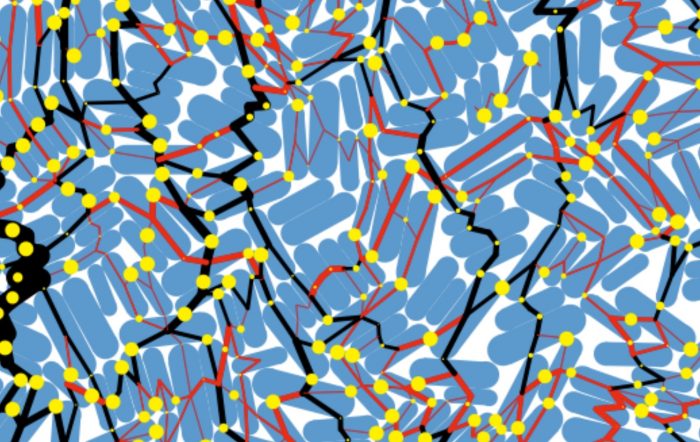
Packing of elongated particles. Simulations by E. Azéma.

A packing of platy particles. Simulations by M. Boton.
The effect of particle shape can also be analyzed by considering its connection with particle rotations. The hindrance of article rotations leads to higher shear strength and dilatancy. A one-to-one mapping between packings of polygons with decreasing number of sides and packings of disks with increasing rolling friction was achieved by simulations. This correspondence between shape angularity and rolling friction was established by considering shear strength, solid fraction, force and fabric anisotropies, and the PDFs of normal forces in steady shearing. This suggests that the hindrance of particle rotations is a major effect of angular particle shape. Conversely, the effect of rolling friction is to force the particles to rearrange as if they were glued to each other so that the clusters of two or more particles behave as noncircular particles.
Further reading: